HAL GPIO driver implementation for STM32F4 series. More...
#include "core/cortex-m4/gpio.h"#include "core/cortex-m4/gpio_reg.h"#include "core/cortex-m4/rcc_reg.h"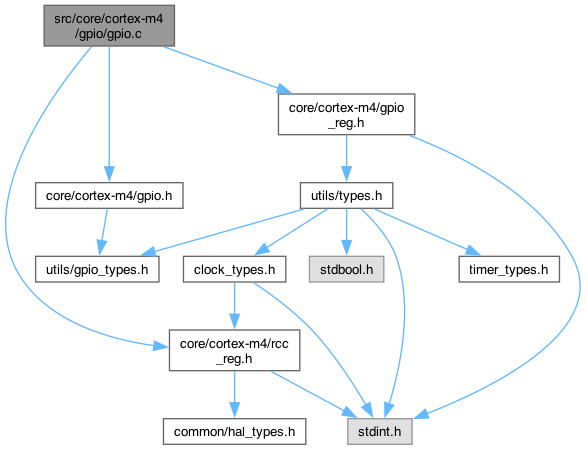
Functions | |
| void | hal_gpio_setmode (hal_gpio_pin pin, hal_gpio_mode mode, hal_gpio_pullup_pulldown pupd) |
| Configure the mode and pull-up/pull-down for a GPIO pin. | |
| hal_gpio_mode | hal_gpio_getmode (hal_gpio_pin pin) |
| Get the current mode of a GPIO pin. | |
| void | hal_gpio_digitalwrite (hal_gpio_pin pin, hal_gpio_state state) |
| Write a digital value to a GPIO pin. | |
| hal_gpio_state | hal_gpio_digitalread (hal_gpio_pin pin) |
| Read the digital value from a GPIO pin. | |
| void | hal_gpio_enable_rcc (hal_gpio_pin pin) |
| Enable the RCC clock for a GPIO port. | |
| void | hal_gpio_set_alternate_function (hal_gpio_pin pin, hal_gpio_alternate_function_t alt_fn) |
| Configure alternate function for a GPIO pin. | |
| void | hal_gpio_set_output_type (hal_gpio_pin pin, hal_gpio_output_type otyper) |
| Configure GPIO output type. | |
| void | hal_gpio_set_output_speed (hal_gpio_pin pin, hal_gpio_output_speed speed) |
| Configure GPIO output speed. | |
Detailed Description
HAL GPIO driver implementation for STM32F4 series.
This file contains the implementation of GPIO hardware abstraction layer functions for STM32F4 microcontrollers. It provides complete GPIO pin configuration and control capabilities including:
- Pin mode configuration (input/output/alternate/analog)
- Digital input/output operations
- Alternate function selection
- Output speed and type configuration
- Built-in pull-up/pull-down resistor control
All functions handle the required RCC clock enabling automatically.
- Copyright
- © NAVROBOTEC PVT. LTD.
Function Documentation
◆ hal_gpio_digitalread()
| hal_gpio_state hal_gpio_digitalread | ( | hal_gpio_pin | pin | ) |
Read the digital value from a GPIO pin.
Read the digital state from a GPIO pin.
- Parameters
-
pin Pin identifier to read
- Returns
- Current digital state of the pin (HIGH or LOW)
Reads the IDR register for the specified pin and returns the current input state.
< GPIOA base address
◆ hal_gpio_digitalwrite()
| void hal_gpio_digitalwrite | ( | hal_gpio_pin | pin, |
| hal_gpio_state | state ) |
Write a digital value to a GPIO pin.
Write a digital state to a GPIO pin.
- Parameters
-
pin Pin identifier to control state Desired output state (HIGH or LOW)
Uses the BSRR register for atomic set/reset operations to avoid read-modify-write sequences.
< GPIOA base address
< GPIOA base address
◆ hal_gpio_enable_rcc()
| void hal_gpio_enable_rcc | ( | hal_gpio_pin | pin | ) |
Enable the RCC clock for a GPIO port.
Enable the RCC clock for a specific GPIO pin's port.
- Parameters
-
pin Pin identifier whose port clock should be enabled
Enables the AHB1 peripheral clock for the GPIO port containing the specified pin. This is automatically called by other GPIO functions when needed.
◆ hal_gpio_getmode()
| hal_gpio_mode hal_gpio_getmode | ( | hal_gpio_pin | pin | ) |
Get the current mode of a GPIO pin.
- Parameters
-
pin Pin identifier to query
- Returns
- Current GPIO mode of the specified pin
Reads the MODER register for the specified pin and returns the current mode configuration.
< GPIOA base address
◆ hal_gpio_set_alternate_function()
| void hal_gpio_set_alternate_function | ( | hal_gpio_pin | pin, |
| hal_gpio_alternate_function_t | alt_fn ) |
Configure alternate function for a GPIO pin.
Set the alternate function for a GPIO pin.
- Parameters
-
pin Pin identifier to configure alt_fn Alternate function number/type to assign
Configures the specified pin for alternate function mode and sets the appropriate alternate function selection in AFRL/AFRH. Automatically enables the GPIO port clock if needed.
< GPIOA base address
< GPIOA base address
< GPIOA base address
< GPIOA base address
◆ hal_gpio_set_output_speed()
| void hal_gpio_set_output_speed | ( | hal_gpio_pin | pin, |
| hal_gpio_output_speed | speed ) |
Configure GPIO output speed.
Set the output speed for a GPIO pin.
- Parameters
-
pin Pin identifier to configure speed Desired output speed (low/medium/high/very high)
Sets the output speed in the OSPEEDR register for the specified pin. Does not change the pin mode - must be configured separately.
< GPIOA base address
< GPIOA base address
◆ hal_gpio_set_output_type()
| void hal_gpio_set_output_type | ( | hal_gpio_pin | pin, |
| hal_gpio_output_type | otyper ) |
Configure GPIO output type.
Set the output type for a GPIO pin.
- Parameters
-
pin Pin identifier to configure otyper Output type (push-pull or open-drain)
Sets the output type in the OTYPER register for the specified pin. Does not change the pin mode - must be configured separately.
< GPIOA base address
< GPIOA base address
◆ hal_gpio_setmode()
| void hal_gpio_setmode | ( | hal_gpio_pin | pin, |
| hal_gpio_mode | mode, | ||
| hal_gpio_pullup_pulldown | pupd ) |
Configure the mode and pull-up/pull-down for a GPIO pin.
Set the mode of a GPIO pin.
- Parameters
-
pin Pin identifier (e.g., PA5, PC13) mode Desired pin mode (input/output/alternate/analog) pupd Pull-up/pull-down configuration
This function:
- Enables the GPIO port clock via RCC
- Configures the pin mode in MODER register
- Sets pull-up/pull-down resistors in PUPDR register
- Note
- Automatically enables the GPIO port clock if not already enabled // Example: Configure PA5 as output with no pull-up/pull-downhal_gpio_setmode(PA5, HAL_GPIO_MODE_OUTPUT, HAL_GPIO_NO_PULL);void hal_gpio_setmode(hal_gpio_pin pin, hal_gpio_mode mode, hal_gpio_pullup_pulldown pupd)Set the mode of a GPIO pin.Definition gpio.c:41
< GPIOA base address
< GPIOA base address
< GPIOA base address
< GPIOA base address