Loading...
Searching...
No Matches
main.c File Reference
Example: Read raw temperature from BMP180 over I2C and print via UART2. More...
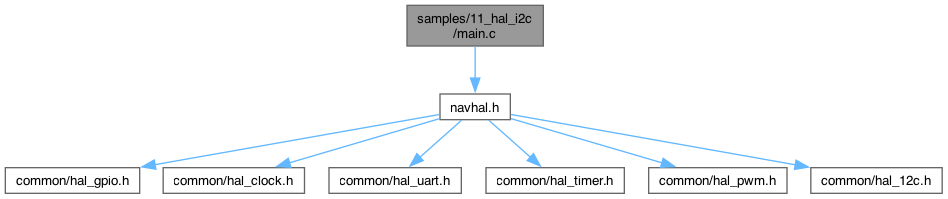
#include "navhal.h"
Include dependency graph for main.c:
Macros | |
| #define | CORTEX_M4 |
| #define | BMP180_ADDR 0x77 |
| #define | BMP180_REG_CONTROL 0xF4 |
| #define | BMP180_REG_RESULT 0xF6 |
| #define | BMP180_CMD_TEMP 0x34 |
| #define | I2C_BUS I2C1 |
Functions | |
| int | main (void) |
Detailed Description
Example: Read raw temperature from BMP180 over I2C and print via UART2.
- Initializes SysTick for delay functions.
- Configures UART2 at 9600 baud for console output.
- Configures I2C1 and GPIO pins for BMP180 communication (PB8=SCL, PB9=SDA).
- Periodically starts a temperature measurement, reads the raw value, and prints it.
- Note
- Delay between measurement and reading follows BMP180 datasheet (~4.5 ms).
© 2025 NAVROBOTEC PVT. LTD. All rights reserved.
Macro Definition Documentation
◆ BMP180_ADDR
| #define BMP180_ADDR 0x77 |
◆ BMP180_CMD_TEMP
| #define BMP180_CMD_TEMP 0x34 |
◆ BMP180_REG_CONTROL
| #define BMP180_REG_CONTROL 0xF4 |
◆ BMP180_REG_RESULT
| #define BMP180_REG_RESULT 0xF6 |
◆ CORTEX_M4
| #define CORTEX_M4 |
◆ I2C_BUS
| #define I2C_BUS I2C1 |
Function Documentation
◆ main()
| int main | ( | void | ) |
< Initialize SysTick for delays
< Initialize UART2 at 9600 baud
< Stop execution if I2C init fails
< Wait for conversion (~4.5 ms for temperature)
< Assumes uart2_write_int exists
< Wait 1 second before next measurement