Loading...
Searching...
No Matches
main.c File Reference
Print system clock and bus clocks over UART2. More...
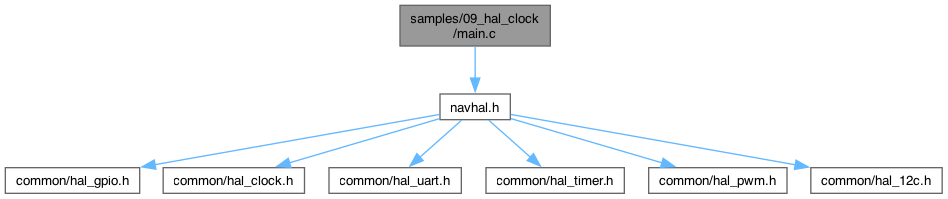
#include "navhal.h"
Include dependency graph for main.c:
Macros | |
| #define | CORTEX_M4 |
Functions | |
| int | main (void) |
Variables | |
| hal_pll_config_t | pll_cfg |
| PLL configuration: 8 MHz HSE -> 168 MHz system clock. | |
| hal_clock_config_t | cfg |
| System clock source configuration. | |
Detailed Description
Print system clock and bus clocks over UART2.
This example demonstrates:
- Initializing the PLL for system clock configuration.
- Initializing SysTick timer.
- Initializing UART2 at 9600 baud for console output.
- Printing SYSCLK, AHBCLK, APB1CLK, and APB2CLK periodically.
© 2025 NAVROBOTEC PVT. LTD. All rights reserved.
Macro Definition Documentation
◆ CORTEX_M4
| #define CORTEX_M4 |
Function Documentation
◆ main()
| int main | ( | void | ) |
< Initialize system clock with PLL
< Initialize SysTick with 40 µs tick
< Initialize UART2 at 9600 baud
< Print SYSCLK label
< Print system clock
< Print APB1CLK label
< Print APB1 clock
< Print APB2CLK label
< Print APB2 clock
< Print AHBCLK label
< Print AHB clock
< Newline
< Wait 1 second
Variable Documentation
◆ cfg
Initial value:
= {
.source = HAL_CLOCK_SOURCE_PLL
}
@ HAL_CLOCK_SOURCE_PLL
Phase-locked loop (derived clock)
Definition clock_types.h:27
System clock source configuration.
◆ pll_cfg
| hal_pll_config_t pll_cfg |
Initial value:
PLL configuration: 8 MHz HSE -> 168 MHz system clock.