Loading...
Searching...
No Matches
main.c File Reference
Example application: Generate PWM on PB10 using TIM2 and print duty cycle over UART2. More...
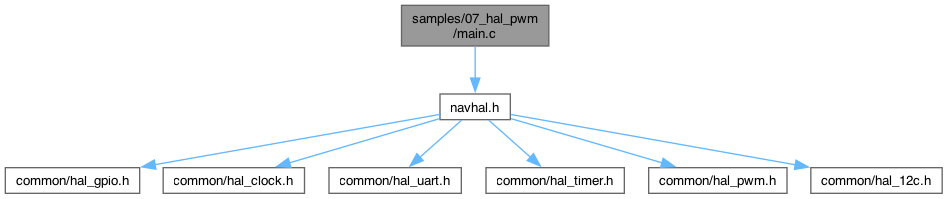
#include "navhal.h"
Include dependency graph for main.c:
Macros | |
| #define | CORTEX_M4 |
Functions | |
| int | main (void) |
Detailed Description
Example application: Generate PWM on PB10 using TIM2 and print duty cycle over UART2.
- Initializes SysTick timer with 40 µs tick.
- Initializes UART2 at 9600 baud.
- Configures PB10 as alternate function (AF1) for TIM2_CH3.
- Initializes TIM2 for PWM output using HAL PWM driver.
- Continuously ramps the duty cycle from 0% to 100% and prints it over UART2.
- Copyright
- © NAVROBOTEC PVT. LTD.
Macro Definition Documentation
◆ CORTEX_M4
| #define CORTEX_M4 |
Function Documentation
◆ main()
| int main | ( | void | ) |
< Initialize SysTick with 40 µs tick
< Initialize UART2 at 9600 baud
< Set PB10 as alternate function
< AF1 for TIM2_CH3
< Initialize PWM handle on TIM2, channel 3
< Init PWM at 15 kHz, 10% duty cycle
< Start PWM output
< Variable for duty cycle update
< Update PWM duty cycle
< Increment duty cycle by 1%
< Reset to 0% after 100%
< Print current duty cycle over UART2
< Newline and carriage return
< Delay 10 ms