Loading...
Searching...
No Matches
main.c File Reference
Blink LED on PA05 and print system millis over UART2. More...
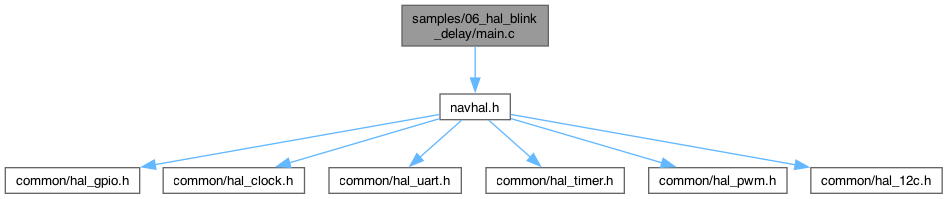
#include "navhal.h"
Include dependency graph for main.c:
Macros | |
| #define | CORTEX_M4 |
Functions | |
| int | main (void) |
Detailed Description
Blink LED on PA05 and print system millis over UART2.
This example demonstrates:
- Initializing SysTick timer with 40 µs tick.
- Configuring GPIO PA05 as output for LED control.
- Initializing UART2 at 9600 baud for console output.
- Initializing TIM5 timer (prescaler 0, auto-reload 1e9).
- Toggling LED and printing system millis in an infinite loop.
© 2025 NAVROBOTEC PVT. LTD. All rights reserved.
Macro Definition Documentation
◆ CORTEX_M4
| #define CORTEX_M4 |
Function Documentation
◆ main()
| int main | ( | void | ) |
< Initialize SysTick with 40 µs tick
< Initialize UART2 at 9600 baud
< Configure PA05 as output
< Initialize TIM5 with prescaler 0 and auto-reload 1e9
< Set PA05 HIGH
< Delay 500 ms
< Set PA05 LOW
< Delay 500 ms
< Print label
< Print system millis
< Newline and carriage return