Loading...
Searching...
No Matches
uart.c File Reference
UART driver implementation for STM32F4 series. More...
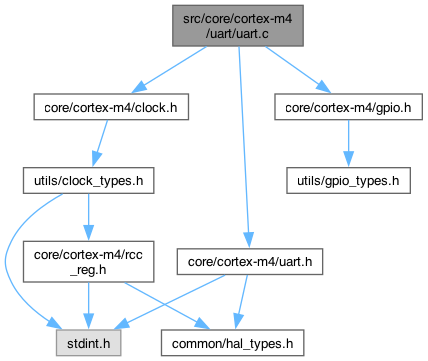
#include "core/cortex-m4/uart.h"#include "core/cortex-m4/clock.h"#include "core/cortex-m4/gpio.h"#include "core/cortex-m4/rcc_reg.h"#include "core/cortex-m4/uart_reg.h"
Include dependency graph for uart.c:
Functions | |
| void | uart_init (uint32_t baudrate, hal_uart_t uart) |
| Initialize the specified UART peripheral. | |
| void | uart_write_char (char c, hal_uart_t uart) |
| Transmit a single character via UART. | |
| void | uart_write_int (int32_t num, hal_uart_t uart) |
| Transmit a 32-bit signed integer via UART. | |
| void | uart_write_float (float num, hal_uart_t uart) |
| Transmit a floating-point number via UART. | |
| void | uart_write_string (const char *s, hal_uart_t uart) |
| Transmit a null-terminated string via UART. | |
| void | uart1_init (uint32_t baudrate) |
| Initialize USART1 peripheral. | |
| void | uart6_init (uint32_t baudrate) |
| Initialize USART6 peripheral. | |
| void | uart2_init (uint32_t baudrate) |
| Initialize USART2 peripheral. | |
| void | uart2_write_char (char c) |
| Transmit a single character via USART2. | |
| void | uart1_write_char (char c) |
| Transmit a single character via USART1. | |
| <<<<<<< HEAD=======void uart6_write_char(char c) { UARTx_Reg_Typedef *usart=GET_USARTx_BASE(6);if(usart==NULL) return;while(!(usart->SR &USART_SR_TXE)) ;usart->DR=c;} void uart2_write_int(int32_t num) { char buf[12];int i=0;if(num==0) { uart2_write_char('0');return;} if(num< 0) { uart2_write_char('-');num=-num;} while(num > 0) { buf[i++]='0'+(num % 10);num/=10;} while(i--) { uart2_write_char(buf[i]);} } void uart1_write_int(int32_t num) { char buf[12];int i=0;if(num==0) { uart1_write_char('0');return;} if(num< 0) { uart1_write_char('-');num=-num;} while(num > 0) { buf[i++]='0'+(num % 10);num/=10;} while(i--) { uart1_write_char(buf[i]);} } void uart6_write_int(int32_t num) { char buf[12];int i=0;if(num==0) { uart6_write_char('0');return;} if(num< 0) { uart6_write_char('-');num=-num;} while(num > 0) { buf[i++]='0'+(num % 10);num/=10;} while(i--) { uart6_write_char(buf[i]);} } void uart2_write_float(float num) { if(num< 0) { uart2_write_char('-');num=-num;} int32_t integer=(int32_t) num;uart2_write_int(integer);uart2_write_char('.');float floating=num - integer;uart2_write_int((int32_t)(floating *100000+0.5f));} void uart1_write_float(float num) { if(num< 0) { uart1_write_char('-');num=-num;} int32_t integer=(int32_t) num;uart1_write_int(integer);uart1_write_char('.');float floating=num - integer;uart1_write_int((int32_t)(floating *100000+0.5f));} void uart6_write_float(float num) { if(num< 0) { uart6_write_char('-');num=-num;} int32_t integer=(int32_t) num;uart6_write_int(integer);uart6_write_char('.');float floating=num - integer;uart6_write_int((int32_t)(floating *100000+0.5f));} void uart2_write_string(const char *s) { while(*s) { uart2_write_char(*s++);} } void uart1_write_string(const char *s) { while(*s) { uart1_write_char(*s++);} } void uart6_write_string(const char *s) { while(*s) { uart6_write_char(*s++);} } > > > > > > > char | uart_read_char (hal_uart_t uart) |
| Read a single character from the specified UART. | |
| char | uart1_read_char (void) |
| Read a single character from USART1. | |
| char | uart2_read_char (void) |
| Read a single character from USART2. | |
| char | uart6_read_char (void) |
| Read a single character from USART6. | |
| int | uart_available (hal_uart_t uart) |
| Check if data is available to read from specified UART. | |
| int | uart1_available (void) |
| Check if data is available to read from USART1. | |
| int | uart2_available (void) |
| Check if data is available to read from USART2. | |
| int | uart6_available (void) |
| Check if data is available to read from USART6. | |
| uint32_t | uart2_read_until (char *buffer, uint32_t maxlen, char delimiter) |
| Read characters from USART2 until delimiter or max length. | |
Detailed Description
UART driver implementation for STM32F4 series.
<<<<<<< HEAD
This file provides UART communication functions for STM32F4 microcontrollers.
It supports USART1, USART2, and USART6 peripherals with:
UART initialization and I/O functions for STM32F4 UART1, UART2, and UART6.
This file provides the implementation of UART communication functions for STM32F401RE microcontroller. It supports USART1, USART2, and USART6 peripherals with the following features:
73eb6c283269d3698b418665a84bf3716bb15e61
- Baud rate configuration
- Character, integer, float, and string transmission
- Character reception
- Data availability checking
- Blocking (polling) implementations
The implementation uses GPIO alternate functions for UART pins and provides both generic (UART instance parameter) and specific functions.
- Note
- All functions are blocking and will wait for hardware operations to complete
- Default configuration: 8 data bits, no parity, 1 stop bit
- Copyright
- © NAVROBOTEC PVT. LTD.